Article
Related Links
Reinhard Gentner1,2 and Joseph Classen1
1 Human Cortical Physiology and Motor Control Laboratory, Dept. Neurology, University of Wuerzburg, D-97080 Wuerzburg, Germany
2 Institute for Measurement Systems and Sensor Technology, Technical University of Munich, D-80333 Muenchen, Germany
Abstract
Sensor gloves for measurements of finger movements are a promising tool for objective assessments of kinematic parameters and new rehabilitation strategies. Here, a novel low-cost sensor glove equipped with resistive bend sensors is described and evaluated. Resistive bend sensors were modified in order to optimize measurement accuracy (quantified as the stability of sensor signal after a fast and constant bending) and to increase sensor linearity, reducing calibration time from several minutes to only ~10s. Reliability analysis of the sensor glove in 5 subjects showed an intraclass correlation coefficient (ICC) of 0.93±0.05, a mean standard deviation of 1.59° and an overall error of 4.96°, comparable to previously evaluated sensor gloves. User acceptance and applicability, assessed by a user feedback questionnaire, was high. Thus, with minor modifications, resistive bend sensors are suitable for accurate assessments of human finger movements. The low material costs (< US $500) and easy manufacturing make this solution interesting for widespread use in research, clinical and rehabilitative settings.
Introduction
Understanding the control of human finger movements is essential for the interpretation of deficits after injuries to the central nervous system and the development of rehabilitation strategies. In an attempt to reach this understanding, sensor gloves have been used to record and analyze voluntary human finger movements in healthy subjects (e.g. (Boesnach et al., 2004; Jerde et al., 2003; Lang and Schieber, 2004a; Mason et al., 2001; Santello et al., 1998; Weiss and Flanders, 2004)) and patients (Lang and Schieber, 2003, 2004b). Additionally, we have shown that finger movements elicited by transcranial magnetic stimulation (TMS) of the motor cortex revealed new insights into the operation of the motor system (Classen et al., 1998; Gentner and Classen, 2006) and may complement sensor glove based rehabilitation systems (Adamovich et al., 2004; Holden, 2005).
Sensor gloves, however, have not yet been widely integrated into clinical practice. This may be due, in part, to technical characteristics of available sensor gloves. Ideally, a sensor glove should allow accurate measurements (stability of the sensor signal, repeatability of movements), be easy to apply (comfortable during donning, doffing and use), rapidly calibrated, available for left and right hands, as well as different hand sizes, and be compatible with other neuroscience methods such as TMS. Finally, it should be easily affordable as high costs may prevent its widespread use.
Several groups and companies have developed (e.g. (Hommel et al., 1994; Simone et al., 2007; Tsagarakis et al., 2006; Williams et al., 2000)), commercialized (e.g., 5DT Data Glove, CyberGlove®II, X-IST DataGlove, HumanGlove, Power Glove, P5 Glove, Sensor Glove II, VPL DataGlove, or DG5-VHand) or evaluated (Dipietro et al., 2003; Kessler et al., 1995; Mentzel et al., 2001; Wise et al., 1990) different sensor gloves over the past 15 years. Of these, the “sensor glove” developed by Simone and colleagues is noteworthy for using low-cost resistive bend sensors (Flexpoint, Draper, UT, USA). In their design, 5 sensors (3” length) each embedded in a plastic sheath and a Lycra sleeve were attached to the metacarpophalangeal joints by double sided medical grade adhesive tape (Simone et al., 2007). Despite reasonable stability and repeatability results, a drawback of these sensors was the non-linear relationship between sensor signals and bend angle, requiring a time consuming calibration (~8 min for 5 sensors) for each individual.
Here, a novel sensor glove equipped with considerably more resistive bend sensors, 10 for recording flexion and 4 for recording abduction movements, is described and evaluated. Additionally, the sensors were modified in order to enhance measurement accuracy and to increase sensor linearity. Repeatability tests as introduced by Wise and colleagues (Wise et al., 1990) yielded similar accuracy results compared to other glove designs (Dipietro et al., 2003; Simone et al., 2007; Wise et al., 1990). As a consequence, sensor linearization calibration time was reduced from several minutes to ~10 s. Since the glove was developed at the University of Wuerzburg it was termed -Glove.
Methods
The study was approved by the Ethics committee of the University of Wuerzburg and written informed consent was obtained from all participants.
Sensor evaluation and modification
We evaluated resistive bend sensors (Flexpoint, Draper, UT, USA; 2’’ sensors with no overlaminate) before and after two modifications: Modification 1: In order to enhance stability of the sensor signal, a thin unplasticised polyvinyl chloride (PVC) foil with a width of 4 mm and a thickness of 0.2 mm was fixed over the carbon layer on the front side of the sensor using an instant adhesive (Pattex Plastik, Henkel, Duesseldorf, Germany). The sensor was then turned around and flexed in the opposite direction such that the attached plastic foil was squeezed when bent. Modification 2: To enhance sensor linearity, a resistance of RParallel = 18 kΩ (47 kΩ for abduction sensors) was placed in parallel to each sensor after Modification 1. Sensor characteristics were determined according to two different measures before and after modifications: The change of the sensor signal over time after an abrupt and constant bending (“step response”) and the linearity of the relationship between sensor resistance and bending angle (“calibration curve”).
Sensor step response
The step response was determined in a similar fashion as reported earlier (Simone and Kamper, 2005) and served as a measure to which degree the sensor resistance changed over time, after a transition to a different constant bending angle. The resistance variation of 6 sensors during 40 s of bending at 60° was tested before and after Modification 1. A sensor was attached to a manual goniometer (1° resolution). After remaining in the neutral (0°) position for 10 s, the goniometer (and the sensor) was bent (~500 ms movement duration) and adjusted at a bending position of 60° for 40 s. Subsequently, it was returned to the baseline position for 10 s. To quantify the step response behaviour of each sensor, the mean of 3 measurements before and after Modification 1 was used. The ratios of the signal value (which was proportional to the resist
ance of the sensor) as obtained immediately after the bending (T0) and the signal value 1, 5, 10, 20 and 30 s (T1 – T5) after the bending, were calculated. Note that for these measurements, the parallel resistance of the conditioning circuit (see below) was not present.
Additionally, to assess the change of the sensor resistance over a longer time period, 3 of the 6 sensors were tested in a condition lasting 60 min. Here, the sensor remained in the neutral position for 1 min, bent to 60° for 58 min and finally returned to baseline for 1 min. Again, the mean of 3 measurements for each sensor before and after Modification 1 was used for analysis. The ratios of the signal value immediately after the bending (T0) and the signal value after 10, 20, 30, 40 and 50 min (T6 – T10) were calculated. For visualization, sensor signals were normalized to the maximum value (termed as the step function for 60°) immediately after bending. In the current setup, Modification 1 was only applied to the 10 sensors measuring flexion movements.
Sensor linearity
The relationship between the change of sensor resistance (which was proportional to the voltage signal changes after signal conditioning, see below) and the bend angle, the calibration curve, was assessed. After Modification 1, a sensor was placed over a goniometer which was adjusted to 0, 15, 30, 45, 60, 75 and 90°. In each case the corresponding sensor resistance was recorded. The procedure was repeated three times and the mean was used for the calibration curve. Based on the calibration curve, the change of the slope of the curve was simulated dependent on the value of a resistance, placed parallel to the sensor, according to
The aim of this procedure was to find the optimal resistance RParallel, which maximizes the linearity of the calibration curve. Finally, a resistance with the optimal value was placed parallel to the bend sensor, and a new calibration curve was determined (see Modification 2).
Sensor glove
A glove for the right hand (medium hand size) was custom fabricated out of a stretchable grade of Lycra®. On the dorsal side of the hand, two layers of Lyrca® were sewn together so that the sensors could be inserted between the layers (Fig. 1). After Modification 2, ten 2” sensors were placed over the dorsal aspects of the metacarpal (MCP) and proximal interphalangeal (PIP) joints. For the thumb, the sensors were placed over the MCP and interphalangeal (IP) joint. The end of the proximal sensor was allowed to overlap with the distal sensor so that the sensors could be optimally placed over the MCP and PIP joints (Fig. 1C). To ensure that the sensors did not leave their position, they were sewed at the proximal end to the glove (arrows in Fig. 1A, B and C). Abduction (ABD) sensors consisted of four 1” sensors from the same manufacturer and were placed in a half-circle configuration between the Index-Middle, Middle-Ring and Ring-Little fingers (Fig. 1 B). If two fingers were abducted, the fixed ends of the sensors were pulled apart causing an increase in bending radius and thus a reduction of sensor resistance. The Thumb-Index abduction sensor was fixed to the glove material between thumb and index finger.
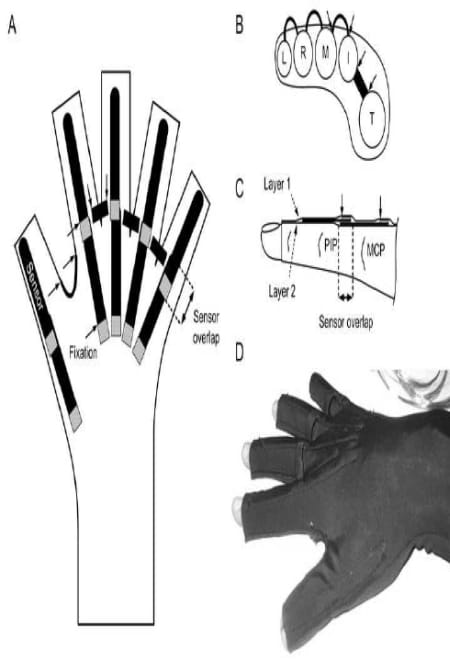
Fig. 1: The Glove with 14 sensors to measure flexion and abduction movements. (A) Top view of the glove. Ten sensors after Modification 2 were placed over the dorsal aspects of the metacarpal (MCP) and proximal interphalangeal (PIP) joints. For the thumb, the sensors were placed over the MCP and interphalangeal (IP) joint. To ensure that the sensors did not leave their position, they were fixed to the glove stuff at one end (black arrows). Short black rectangles indicate top view of abduction sensors. (B) Front view of the glove (T indicates the thumb, I the index finger, M the middle finger, R the ring finger and L the little finger). Four abduction (ABD) sensors were placed in a halfcircle configuration between the Index-Middle, Middle-Ring and Ring-Little fingers. The Thumb-Index abduction sensor was fixed to the glove material between thumb and index finger. (C) Section through the middle of a finger. On the dorsal side of the hand, two layers of Lyrca® were sewed together in a way that the sensors could be inserted between the layers. The end of the proximal sensor was allowed to overlap with the distal sensor so that the sensors could be optimally placed over both, the MCP and PIP joints. (D) Image of a subject with a medium hand size wearing the glove.
For validation of the sensor linearity, the calibration curves of sensors embedded in the glove were assessed in 3 subjects. Two subjects had a medium to large hand size (corresponding to size 7.5), whereas the hand size of the third subject was small (corresponding to size 6). A goniometer (1° resolution) was adjusted at 0, 15, 30, 45, 60, 75 and 90° (for the thumb sensors maximum 60°) and placed over the dorsal aspect of each joint. The resistance was recorded while keeping the joint at a constant angle. For abduction sensors, subjects placed their flat hand on a table at marked angle positions of 0, 5, 10, 15, 20, 25 and 30°. This procedure was repeated three times for each subject and the average was used for the calibration curve.
Sensor signal conditioning
The sensor cables (thickness 0.15 mm; length 1.5 m) were plugged into the physically separated conditioning unit. The conditioning unit consisted of 14 amplifier circuits with adjustable gain. A sensor after Modification 2 served as the feedback resistor of a noninverting amplifier such that a linear relationship between the change in resistance (RSensor,,new) and the output voltage of the amplifier existed (Fig. 2). The voltages of the 14 amplifiers were analog/digital (A/D) converted at 12 bit by a commercially available A/D card (LabJack U3, LabJack Corporation, Lakewood, CO, USA) and fed into a personal computer via USB. Sensor signals were sampled at 50 Hz and written to data files by custom developed Java software. The sensor resolution was ~0.1° and can further be enhanced by using more flexible conditioning setups which, for example, allow individual input voltage adaptations for each amplification circuit. Additionally, an analogous output of the sensor signals was provided.
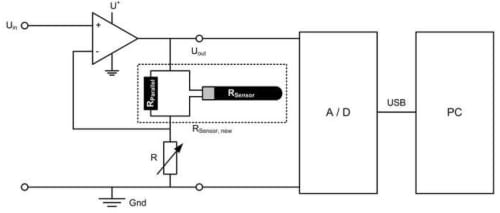
Fig. 2: Conditioning circuit for 1 sensor to convert sensor resistance change into digital voltage signals. A sensor after Modification 2 was inserted in the feedback path of a noninverting amplifier such that a linear relationship between the change in resistance and the output voltage of the amplifier existed. The conversion gain at a constant input voltage Uin could be adjusted by the potentiometer R. The voltages of the 14 amplifiers were A/D converted at 12 bit by a commercially available A/D card and fed into a personal computer via USB.
Repeatability measurements
Due to the linear sensor characteristics after Modification 2, the relationship between the sensor signals and the corresponding bend angles was determined from the absolute maximum and minimum signal value for each sensor. Minimum and maximum values were obtained from three 10 s recordings in which different hand postures (flat hand with minimum abductions of the fingers, fist and flat hand with maximum abductions of the fingers) were adopted by the subjects. Minimum values were associated with 0° whereas maximum values were associated with the anatomically determined maximum flexion angle of each joint (Beers and Berkow, 1999
). We ruled out the possibility that the maximum finger flexion angle was constrained by the sensor glove by asking two experienced physiotherapists to measure the range of motion of the index finger MCP and PIP joint with and without wearing the glove in one subject. No differences were found indicating that the calibration procedure was not compromised by the sensor glove.
Four tests of repeatability, similar to those described earlier (Wise et al., 1990) were conducted in five subjects (three male and two female): A plaster mold was fabricated for each subject to ensure that the finger joints in Test A and B could be consistently placed in the same position. Subjects were asked to create a cylindrical shaped object by squeezing a modelling mass with the thumb in opposition to the other fingers. After the mass became stiff (~20 min) the grip posture could be repeated identically. Because it was shown that grip force affects test accuracy, we followed the recommendation by Dipietro and colleagues in instructing the subjects to grip the mold with as low force as possible (Dipietro et al., 2003).
Test A: Mold grip and glove on between data acquisition
This test aimed to quantify the repeatability of a roughly cylindrical grip posture. The hand of the subject initially was in a flat position on the table. After a Go-Signal the subject gripped the plaster mold until data recording stopped after 6 s. Then the hand was returned to the flat position and the next trial was initiated. Ten blocks were recorded, each block consisting of 10 trials. The subjects did not remove the glove between blocks.
Test B: Mold grip and glove off between data acquisition
Test B was analogous to Test A, except that the glove was removed and put on again before each block. Here, the influence of donning and doffing was quantified.
Test C: Flat hand and glove on between data acquisition
To assess the consistency of a neutral position, subject placed their flat hand on a table in marked finger positions. After a Go-Signal, the subject performed a flexion movement of all fingers and returned to the flat hand position after ~3 s. Recordings stopped after 6 s. Again, 10 blocks consisting of 10 trials each were recorded.
Test D: Flat hand and glove off between data acquisition
This test was analogous to Test C except that the glove was removed and put on again before each block.
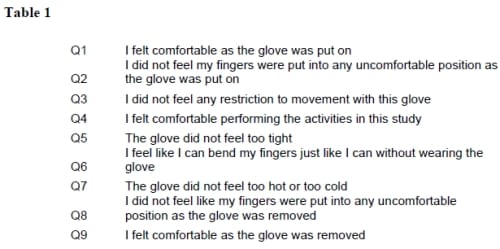
User questionnaire
Feedback regarding comfort with handling and wearing the glove was assessed by a user questionnaire (Table 1) adapted from Simone and colleagues (Simone et al., 2007). Each item was judged on a scale ranging from 1 (strongly disagree) to 7 (strongly agree) by 10 subjects.
Statistical Analysis
After regression analysis, R2 values served as a linearity measure of the calibration curves. For repeatability analysis, the last 20 samples of each trial were averaged to reduce the data to 14 static joint angles representing the end posture of the trial. As previously proposed (Dipietro et al., 2003), the 100 trials for each test can then be represented as a 3-dimensional matrix {Xijk}, where i = 1…10 denotes the ith trial, j = 1…10 the jth block and k = 1…14 the kth sensor. Accuracy of the repeatability measurements was quantified as the range (Range) and the standard deviation (SD) (Dipietro et al., 2003; Simone et al., 2007). For each repeatability test and each subject, Range was computed as
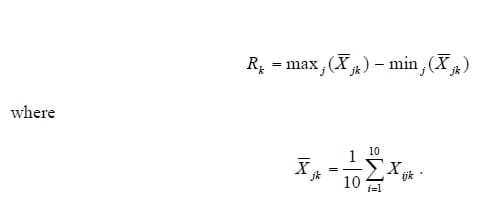
SD was calculated as the standard deviation of the Xjk values. SD and Range values were averaged across joints or across subjects.
The reliability between measures in each test was assessed by intraclass correlation coefficients (ICCs). ICC values were calculated for each test by randomly choosing two trials out of two randomly chosen blocks for each subject. The average angles of the last 20 samples of the two trials were calculated for each subject. Then, the angle pairs of each joint from all subjects were pooled together and an ICC (Shrout and Fleiss, 1979) was calculated for each joint. The ICC calculation is based on the comparison of between-subject and within-subject variance, where the within-subject variance reflects measurement errors. If within-subject variance is low, the ICC approaches 1 and the measurements are considered as reliable. Conversely, if the ICC approaches 0, a large fraction of variance is explained by measurement errors (indicating a low reliability). The mean out of 20 ICC calculations for each joint was used as a measure of joint sensor reliability. Thus, for each joint, four ICC values (one for each test) existed. The mean ICC for each joint across tests served as a measure of reliability for a specific joint.
One-way ANOVA was used to compare R2 values between subjects after calibration. All values are indicated as mean±std.
Results – Sensor Evaluation
Sensor Step Response
For assessment of sensor signal stability a sensor was attached to the manual goniometer as illustrated in Fig. 3A. Six sensors were tested during 40 s of bending (grey lines indicate the mean out of 3 measurement cycles for each sensor; the black line indicates the mean across sensors). The resistance of all sensors continuously decreased for 6.3±1.4 % at T5 (see upper left panel of Fig. 3B and for mean percentage decays at T1-T4). Three of the six sensors were additionally monitored during 58 min of bending. Results indicate that the resistance further continuously declined for ~30 min (T8) and then stayed relatively stable. At the end of the measurement, 50 min after the bending (T10), the mean decay was 16.8±4.9 % (Fig. 3B, upper right panel).
After Modification 1, the sensor resistance decreased for -1.0±0.8 % at T5 (Fig. 3B, lower left panel), ~six times lower in magnitude than the original sensors. Moreover, the resistance of three of the six sensors remained stable (-1.9±1.0 %) until the last measurement at 50 min (T10) after the step response (Fig. 3B, lower right panel). Results for all time points are shown in the appropriate panel of Fig. 3. Thus, with a relatively simple modification, a major drawback of resistive bend sensors for reliable measurements of human finger movements could be removed. A second undesired characteristic of resistive bend sensors, the non-linear behaviour, was compensated by Modification 2.
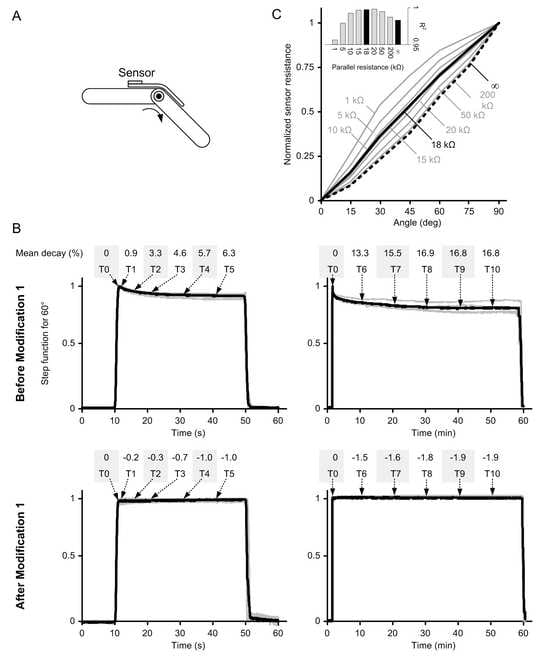
Fig. 3: Change of sensor characteristics before and after sensor modifications. (A) Goniometer with mounted sensor. The sensor could be bent to any desired angle by rotation of the elements of the goniometer. (B) The change of sensor resistance was recorded before (upper left panel) and after (lower left panel) Modification 1 during 40 s of bending to ~60° in six sensors (grey lines indicate the mean out of three measurements from each sensor; black lines indicate the mean of all sensors). Three of the six sensors were also tested before (upper right panel) and after (lower right panel) Modification 1 in a condition lasting 60 min. Mean decay values for T1-T5 and T6-T10, respectively, are shown. In both conditions, Modification 1 considerably reduced the decay of the sensor resistance after the step function. (C) Relationship between the change of sensor resistance and the bend angle (calibration curve) dependent on the value of a resistance placed parallel to the sensor after Modification 1. For comparison, the maximum resistance of each calibration curve was associated with
1 and the minimum resistance was associated with 0. Black colour indicates empirically determined calibration curves, whereas grey colour indicate simulations based on the calibration curve without a parallel resistance (RParallel = ∞, dotted black line). As quantified by R2 values in the subset, linearity of the calibration curve was best with a parallel resistance between 15 kΩ and 20 kΩ. For implementation, a resistance value of 18 kΩ (solid black line) was used (Modification 2).
Sensor linearity
Based on Modification 1, the linearity of the sensor was assessed and enhanced. The shape of the calibration curve was modified by placing a resistor parallel to the sensor (Modification 2) as illustrated in Fig. 3C. The optimal value of the parallel resistance to obtain a linear relationship was calculated on the basis of the calibration curve from a sensor without parallel resistance (Fig. 3C, black dashed line). Numerical simulations of different resistance values (1, 5, 10, 15, 20, 50 and 200 kO) placed parallel to the sensor yielded predictions of how the calibration curve changed its shape (Fig. 3C, thin gray lines). The resistance value of the simulated calibration curves with the highest R2 value and thus best linearity was in the range of 15 – 20 kΩ. A complete list of R2 values (grey bars indicate R2 values of simulated calibration curves; black bars indicate R2 values of empirically determined calibration curves) is shown in the subset of Fig. 3C. For implementation, a resistance with a value of 18 kΩ was placed parallel to the sensor and a new empirical calibration curve was determined (Fig. 3C, solid black line; R2 = 0.9975). For abduction sensors, a resistance value of 47 kΩ was chosen analogously.
Since the calibration curve of the sensors changes when bent about a different radius (Simone and Kamper, 2005) the linearity of the 14 sensors embedded in the glove may differ in subjects with different hand sizes. To address this point, all sensors were manually calibrated in two male subjects with a medium to large hand size and in one female subject with a small hand size. For each subject the procedure took ~30 min to complete. The mean R2 values of all subjects ranged from 0.9855 to 0.9980 with an overall mean of 0.9915±0.0031, indicating a high degree of linearity. Examples of four joints are shown in Fig. 4A (the displayed R2 values indicate the average across subjects). The mean R2 value across joints of the female subject with small hand size (0.9881±0.0086) tended to be somewhat smaller than in the male subjects with larger hand sizes (0.9942±0.0058 and 0.9921±0.0064, respectively) but the differences did not reach statistical significance (ANOVA, F = 2.78, p = 0.07). Thus, the degree of linearity after Modification 2 is only mildly affected by different hand sizes. To obtain absolutely optimal characteristics, the modification parameters may be optimized for gloves manufactured for small and large hands.
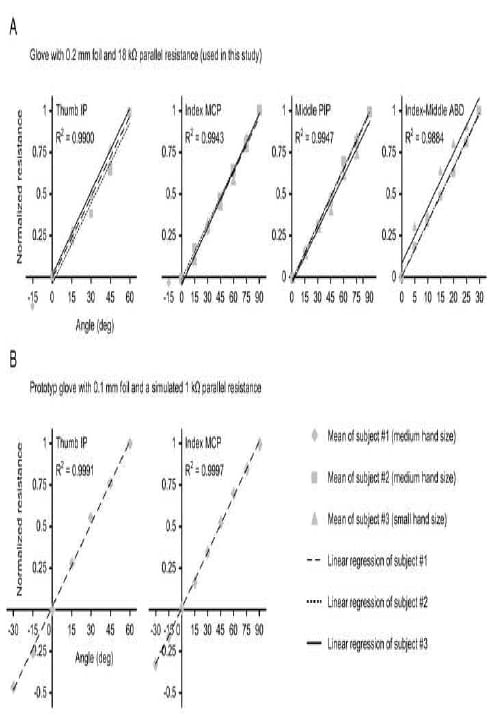
Fig. 4: Linearity of sensors (after Modification 2) embedded in the glove. (A) Mean out of three empirically established normalized calibration curves for four exemplarily joints in three subjects. The displayed average R2 values across subjects were close to 1, indicating a high degree of linearity. In one subject, additionally hyperextension of -15° was measured. Results indicate that the linear relationship of the sensors was not preserved during hyperextension with the current modification parameters. (B) However, we repeated the optimization procedure using a plastic foil with 0.1 mm thickness (Modification 1) and a parallel resistance of 1 kΩ (Modification 2) mounted in a prototype glove in one subject. We found that the linearity was maintained in the range of 30° hyperextension to 90°. Thus, with optimal modification parameters a general disadvantage of resistive bend sensors can be resolved. Examples for the Thumb IP and Index MCP sensor are shown.
A general disadvantage of resistive bend sensors is the abrupt loss of sensitivity when bent in opposite direction which is needed, for example, to measure metacarpophalangeal hyperextension. To address the question how the modifications affected the sensitivity of the sensors when bent in opposite direction, we measured hyperextension (-15°) of the MCP (IP for the thumb) joints in one subject. As illustrated in Fig. 4A, the sensitivity decreased and the linear relationship of the sensors was not preserved for hyperextension movements. However, we repeated the optimization procedure using a plastic foil with 0.1 mm thickness (Modification 1) and a simulated parallel resistance of 1 kΩ (Modification 2) mounted in a prototype glove in one subject. We found that the linearity was maintained in the range of 30° hyperextension to 90° flexion of the MCP (IP and 60° maximum flexion for the thumb) joints within these parameters (mean R2 across all MCP and IP joints of 0.9965±0.0048, see Fig. 4B for examples). Thus, our modification concept is capable of resolving another disadvantage of resistive bend sensors. To our knowledge, this is the first demonstration that the whole range of finger movements in humans can be measured with linearized resistive bend sensors. Because we did not measure hyperextension movements in the current study, the present results are not corrupted. In future, sensor gloves with these optimal modification parameters will be constructed and used. Up to this point, we can show that sensor modifications enhanced the characteristics of the sensors as a pre-requisite for reliable measurements of human finger movements. In the next step, we quantify the repeatability and reliability of the sensor glove.
Repeatability and reliability
The glove was calibrated by using the maximum and the minimum sensor values for each joint without including hyperextension of the metacarpophalangeal joints (interphalangeal for the thumb). Calibration was necessary to adjust the sensor range to different hand sizes. The minimum and maximum values were stable across the three calibration cycles (data not shown), indicating that the glove fitted well to the subject’s hand and did not move during calibration.
The principle test arrangements are illustrated in Fig. 5A. In Test A and B (left image) the repeatability of a roughly cylindrical grip posture was quantified. The hand of the subject was initially in a flat position on the table. After a Go-Signal the subject gripped the plaster mold. After the end of data recording, the hand was returned to the flat position and the next trial was initiated. The consistency of a neutral flat hand position was assessed in Test C and D (Fig. 5A, right image). Typical sensor readings obtained from one subject in Test C are shown in Fig. 5B: data files from 10 trials (1 block) were concatenated and visualized. For each trial, subjects initially placed their flat hand on a table in marked finger positions. After a Go-Signal, the subject performed a flexion movement of all fingers and returned to the flat hand position after ~3 s. Recordings stopped after 6 s, and the mean of the last 20 samples for each joint (dark grey shaded rectangle in Fig. 5B for the first trial) were used for analysis. The glove was removed between blocks for Test B and D.
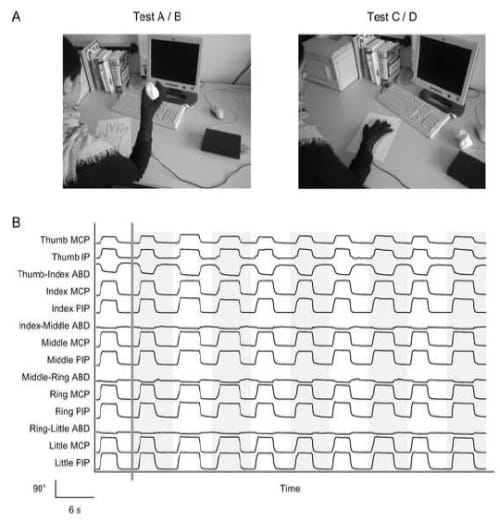
Fig. 5: Principle of repeatability tests. (A) In Test A and B (left image) the repeatability of a roughly cylindrical grip posture was quantified. The hand of the subject initially was in a flat position on the table. After a Go- Signal the subject gripped a plaster mold until data r
ecording stopped after 6 s. Then the hand was returned to the flat position and the next trial was initiated. Ten blocks were recorded, whereas a block consisted of 10 trials. In Test B the glove was removed between blocks. In Test C and D (right image) the consistency of a neutral position was assessed. Subjects initially placed their flat hand on a table in marked finger positions. After a Go-Signal, the subject performed a flexion movement of all fingers and returned to the flat hand position after ~3 s. Recordings stopped after 6 s. In Test D the glove was removed between blocks. (B) Raw data for each joint in one subject. Ten data files from one block of Test C are concatenated and visualized. Different background colours indicate different data files. The last 20 samples of each data file were used for analysis. The dark grey shaded rectangle indicates the last 20 samples of the first data file which corresponded to the flat hand position in (A).
As noted by Wise and colleagues (Wise et al., 1990), Range and SD values are highly correlated (Fig. 6A) to each other (r > 0.99, Pearson’s correlation coefficient). In accordance with previous studies, the average flat hand repeatability (Range 3.29°±1.29°; SD1.07°±0.42°) was better than the average grip repeatability (Range 6.63°±1.86°; SD 2.10°±0.56°). Also, the repeatability without removing the glove (Range 4.35°±2.14°; SD 1.4°±0.65°) was better than the repeatability with removing the glove between blocks (Range 5.57°±2.43°; SD 1.77°±0.76°).
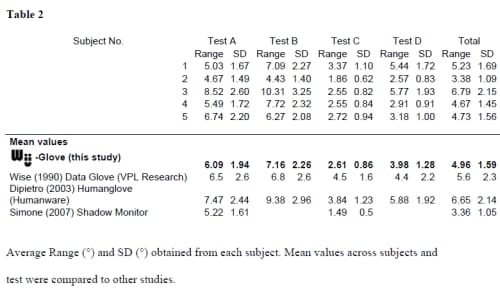
One of the five subjects (subject #3) had a large hand size (>7.5) which made it difficult to pull the glove over his hand consistently. This is reflected in the higher Range and SD values of this subject, especially in Tests B and D (Fig. 6A black triangle). The mean repeatability values across all subjects are summarized and compared to results from other studies in Table 2. Range and SD values were also calculated for each joint across subjects (visualization of SD values in Fig. 6B). In this analysis, all joints showed comparable SD values ranging from 0.96° to 1.93° (Range 3.05° – 6.16°), except the Thumb-Index ABD sensor which had a somewhat higher SD of 3.65° (Range 11.01°).
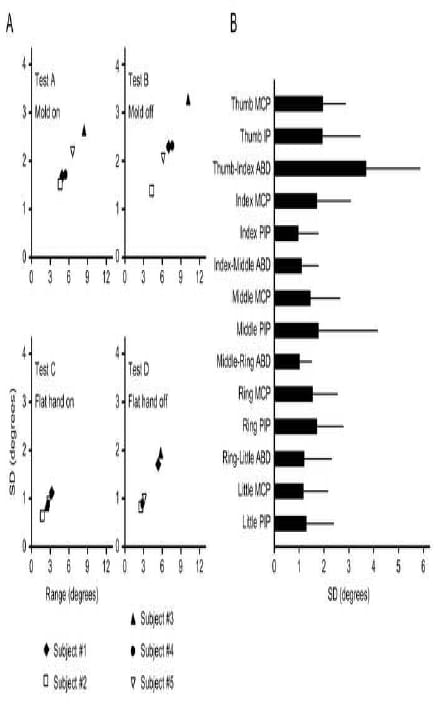
Fig. 6: Results of repeatability analysis. (A) Average Range plotted against average SD for each subject of Test A – Test D. As noted by other authors, Range and SD values were highly correlated to each other. (B) SD of each joint averaged across subjects and tests. Results were comparable to previously evaluated sensor gloves.
ICC values were computed to identify the variability between measures. ICC values close to 1 indicated a high reliability, whereas ICC values close to 0 indicated low reliability. In the current study, the mean ICCs across tests were high and ranged from 0.87 (Middle-Ring ABD) to 0.98 (Little MCP) with an overall average across tests and joints of 0.93±0.05. Thus, repeatability and reliability of the sensor glove is high and lies in the range of previously evaluated sensor gloves. For evaluation of subjective and ergonomic features of the glove, a user feedback questionnaire was constructed.
User Feedback questionnaire
The user feedback questionnaire aimed at assessing the subjective comfort of wearing and handling the glove (answers were coded as: 1 = strongly disagree, 2 = disagree, 3 = somewhat disagree, 4 = neutral, 5 = somewhat agree, 6 = agree, 7 = strongly agree). Subjects felt comfortable during donning (analogue score: 6.3±0.95, Q1), doffing (6.7±0.48, Q9) and did not feel their fingers were put into any uncomfortable position (6.6±0.52, Q2 and 6.5±0.71, Q8). While wearing the glove, participants also felt comfortable (6.4±0.70, Q4), claimed that did not fit too tight (6.5±0.53, Q5) and denied any uncomfortable temperature changes of the hand and fingers (6.9±0.32, Q7). However, due to the mechanical resistance of the glove material and the sensors, subjects felt some restrictions during wearing the glove (4.7±2.11, Q3) so that the finger could not be entirely moved as if they were free (5.5±1.84, Q6). The overall mean score was 6.23±0.91.
To assess to what degree the increased sensor stiffness after Modification 1 affected the mobility of the joints, we additionally performed experiments on three subjects wearing a left and a right glove at the same time. The left glove was equipped with original sensors and the right glove with sensors after Modification 1. Subjects were instructed to move the fingers, after which question 3 and question 6 were asked again for both gloves. The answers to question 3 were equal between both gloves (4.67±0.58 for the left vs. 4.67±2.31 for the right). For question 6, the results of the glove equipped with original sensors (5.33±0.58) were slightly better than that equipped with the modified sensors (5.0±1.73). In summary, these results suggest that Modification 1 contributed very little to the finger joint stiffness in comparison to the glove material.
Discussion
Sensor gloves have a wide area of application including virtual reality, robotics or computer games. Of particular interest is their usage in rehabilitation or physiological assessments. For all applications, accurate measurements, easy handling and a low price are desirable characteristics of a sensor glove. Here we presented a sensor glove, developed at the University of Würzburg (hence it is termed -Glove), that appears to fulfil many of these characteristics.
Sensor resistance stability
Stability of the sensor resistance is mandatory for accurate measurements (Simone and Kamper, 2005). However, carbon ink based sensors show a decay of resistance over time when constantly bent. For example, Abrams-Gentile sensors (Abrams-Gentile Entertainment Inc, New York, USA) decay to ~25% of the initial resistance after 30 s (Simone and Kamper, 2005), confirmed by unpublished results from our lab), limiting their application for quantitative measurements of human finger movements. We found the decay of 2’’ Flexpoint sensors after 30 s to be in the range of ~6%, and, thus even superior to that of 3’’ Flexpoint sensor (decay ~9%) which were previously proposed as the optimal resistive bend sensors (Simone and Kamper, 2005). In separate experiments, we found that the sensor resistance further decreased to ~18% after 50 min of bending. This decay could be significantly reduced to a magnitude < 2% by mounting a thin plastic foil over the sensor substrate. Thus, a major drawback of resistive bend sensors could be removed by Modification 1. That the associated increase of sensor stiffness affects user comfort to a high degree can be ruled out by the answers of question 3 and 6 of the user feedback questionnaire in which subjects answered to feel only mild restrictions of finger movements and did not feel a substantial difference between a glove with modified and a glove with original sensors.
Sensor linearity
A second desirable characteristic is a linear relationship between the final glove sensor signals (usually voltage) and bend angle, whereas the linearity depends on both, sensor resistance and conditioning circuit. Using a signal conditioning circuit that proportionally converts the sensor resistance into voltage signals reduces the source of linearity of the final signal exclusively to the sensor resistance. We obtained a linear relationship between the sensor resistance and bend angle by placing a resistor parallel to the sensor (Modification 2). Because only two angle-voltage pairs were needed (the sensor values at flat han
d position and maximum bent), calibration time of the 14 sensors was performed within only ~10 s. In contrast, if the final voltage signals do not correlate linearly with the joint angles, a time consuming calibration (~30 min in this study, ~8 min for 5 sensors in the study of Simone and colleagues) and additional offline data processing is required (Simone et al., 2007). Moreover, the linearity of the sensor after modification ensures a constant sensor resolution after A/D conversion over the full range of movements, which again is not present when the bending signal before A/D conversion is not linearly related to the bending angle.
Linearity changed very little in subjects with different hand sizes, thus indicating that hand size has a minor effect on linearity. However, to optimize linearity, gloves for different hand sizes (small, middle, large) may be designed with optimal adjusted modification parameters (foil thickness and parallel resistance) for appropriate hand sizes. Similarly, another undesired characteristic of resistive bend sensors, the loss of sensitivity when bent in opposite direction, could be removed by changing the modification parameters. These results demonstrate that resistive bend sensors are suited to linearly measure the whole range of human finger movements. Future sensor gloves and conditioning circuits will be optimized for this feature. We will also test alternative conditioning circuits which do not linearly convert sensor resistance into voltage signals. With such setups, linearization may be performed by the conditioning circuit directly without the need for additional resistances. To our knowledge, the -Glove is the first glove design which utilizes linearized resistive bend sensors and therefore combines low sensor costs with ideal sensor characteristics. Furthermore, the reliability and repeatability of the glove were high.
Repeatability and reliability
While several commercial and non-commercial sensor gloves exist, only a few studies systematically address their reliability and accuracy (Dipietro et al., 2003; Mentzel et al., 2001; Simone et al., 2007; Wise et al., 1990). Compared to these sensor gloves, the – Glove showed similar repeatability and reliability results (Table 2). As illustrated in Fig. 6B, there was no substantial difference between the SD values of the MCP, PIP and ABD (except Thumb-Index ABD) joints. This indicates that the Range and SD values of this glove can be compared to gloves equipped with different sensor types and different number of sensors. The higher errors at the Thumb-Index ABD joint may be related to the position of the sensor on the glove which may not be optimal. A second error source could be the repeatability protocol itself. As noted by others, the results of the repeatability tests are influenced not only by technical characteristics of the sensor glove, but also by factors like the grip strength (Dipietro et al., 2003) or small deviations of the thumb and finger placements. We tried to minimize these effects by instructing the subjects to grip the mold with as little force as possible and monitored a constant position of the hand. Despite these effects SD was only 1.59°, which reflects high measurement repeatability. Reliability was quantitatively assessed by ICCs (ranging from 0.81 – 0.99 with a mean across joints of 0.93), which were comparable to gloves evaluated by Simone et al. (Simone et al., 2007) (ICCs from 0.79 – 0.99 with a mean of 0.95), Dipietro et al. (Dipietro et al., 2003) (ICCs from 0.7 – 1.0) and Mentzel et al. (Mentzel et al., 2001) (ICCs from 0.82 – 0.99, with a mean of 0.94, although in this study the test procedure was somewhat different). Consequently, the repeatability and reliability of the -Glove is similar to other evaluated gloves and also lies within the measurement reliability of manual goniometry (Wise et al., 1990).
Issues related to practical application
User acceptance and applicability, as assessed by a user feedback questionnaire was high. This suggests that the modifications had not been accomplished at the cost of user acceptance. Comfort and measurement accuracy will be further enhanced by adapting the glove to different hand sizes and optimizing the modification parameters that linearity can be extended to hyperextension movements. Another possibility to further optimize user comfort and to increase the physical workspace of the glove would be a wireless data transmission from the glove to the computer. However, the -Glove was intended to work within TMS environments which may have a disrupting effect on wireless data transmission due to its large and rapidly changing magnetic fields (up to 2 Tesla). Those possible external interferences were minimized by removing all electrical elements except the bend sensor from the glove. In first experiments with TMS, we could not find any stimulation artefact or distortion of the sensor signals indicating a reliable operation of the glove in conjunction with this neurophysiological technique. A second advantage of the distributed design was that the same conditioning circuit could be used for different gloves (e.g. for different hand sizes) further reducing costs. To maximize flexibility, the conditioning unit was provided with an analogous output for each sensor. Therefore, it can be connected to any A/D converter, allowing, for example, the simultaneous and synchronous recording of electromyographic signals and finger movements with already present hardware equipment. Finally, sensor resolution (~0.1°) of the -Glove could be optimized by potentiometers of the conditioning circuit and was higher than in most other sensor gloves (ranging from 0.2° to 0.5°). For example, the CyberGlove®II has a nominal resolution of ~0.5°, which may not be optimal for recording small finger movements such as after TMS (Gentner and Classen, 2006).
Conclusions
The Glove presented in the current report provides reliable, linear, high resolution joint angle signals. Elements of the glove incurred material costs of < US$ 500, a factor of ~10 – 20 less than the price of some commercially available sensor gloves. We also found that flawless operation of the glove was retained in the presence of large magnetic fields associated with TMS. This suggests that it may be a useful device for physiological studies, such as in Gentner and Classen (Gentner and Classen, 2006). Finally, user acceptability was comparable to previously described sensor gloves. The fact that it can easily be produced for different hand sizes for the left and right hand makes it a flexible measurement system which may also be adaptable to study movements in non-human primates such as monkeys.
References
- Adamovich SV, Merians AS, Boian R, Tremaine M, Burdea GS, Recce M, Poizner H. A virtual reality based exercise system for hand rehabilitation post-stroke: transfer to function. Conf Proc IEEE Eng Med Biol Soc, 2004; 7: 4936-9.
- Beers MH, Berkow R. The Merck Manual of Diagnosis and Therapy, 17th ed. John Wiley & Sons: New York, 1999.
- Boesnach I, Moldenhauer J, Burgmer C, Beth T, Wank V, Bös K. Classification of Phases in Human Motions by Neural Networks and Hidden Markov Models. IEEE International Conference on Cybernetics and Intelligent Systems: Singapore, 2004: 976-81.
- Classen J, Liepert J, Wise SP, Hallett M, Cohen LG. Rapid plasticity of human cortical movement representation induced by practice. J Neurophysiol, 1998; 79: 1117-23. Dipietro L, Sabatini AM, Dario P. Evaluation of an instrumented glove for hand-movement acquisition. J Rehabil Res Dev, 2003; 40: 179-89.
- Gentner R, Classen J. Modular organization of finger movements by the human central nervous system. Neuron, 2006; 52: 731-42.
- Holden MK. Virtual environments for motor rehabilitation: review. Cyberpsychol Be
hav, 2005; 8: 187-211. - Hommel G, Hofmann FG, Henz J. The TU Berlin High-Precision Sensor Glove. In Proceedings of the WWDU´94, Fourth International Scientific Conference, University of Milan, 1994.
- Jerde TE, Soechting JF, Flanders M. Biological constraints simplify the recognition of hand shapes. IEEE Trans Biomed Eng, 2003; 50: 265-9.
- Kessler GD, L. H, N. W. Evaluation of the Cyber Glove as a whole hand input device. ACM Trans Comput Hum Interact, 1995; 2: 263-83.
- Lang CE, Schieber MH. Differential impairment of individuated finger movements in humans after damage to the motor cortex or the corticospinal tract. J Neurophysiol, 2003; 90: 1160-70.
- Lang CE, Schieber MH. Human finger independence: limitations due to passive mechanical coupling versus active neuromuscular control. J Neurophysiol, 2004a; 92: 2802-10.
- Lang CE, Schieber MH. Reduced muscle selectivity during individuated finger movements in humans after damage to the motor cortex or corticospinal tract. J Neurophysiol, 2004b; 91: 1722-33.
- Mason CR, Gomez JE, Ebner TJ. Hand synergies during reach-to-grasp. J Neurophysiol, 2001; 86: 2896-910.
- Mentzel M, Hofmann F, Ebinger T, Jatzold B, Kinzl L, Wachter NJ. Reproducibility of measuring the finger joint angle with a sensory glove. Handchir Mikrochir Plast Chir, 2001; 33: 59-63.
- Santello M, Flanders M, Soechting JF. Postural hand synergies for tool use. J Neurosci, 1998; 18: 10105-15.
- Shrout PE, Fleiss JL. Intraclass Correlations: Uses in Assessing Rater Reliabiltiy. Psychological Bulletin, 1979; 86: 420-28.
- Simone LK, Kamper DG. Design considerations for a wearable monitor to measure finger posture. J Neuroeng Rehabil, 2005; 2: 5.
- Simone LK, Sundarrajan N, Luo X, Jia Y, Kamper DG. A low cost instrumented glove for extended monitoring and functional hand assessment. J Neurosci Methods, 2007; 160: 335-48.
- Tsagarakis NG, Kenward B, Rosander K, Caldwell DG, von Hofsten C. “BabyGlove”: A Device to study Hand Motion Control Development in Infants. EuroHaptics, 2006. Weiss EJ, Flanders M. Muscular and postural synergies of the human hand. J Neurophysiol, 2004; 92: 523-35.
- Williams NW, Penrose JM, Caddy CM, Barnes E, Hose DR, Harley P. A goniometric glove for clinical hand assessment. Construction, calibration and validation. J Hand Surg, 2000; 25: 200-7.
- Wise S, Gardner W, Sabelman E, Valainis E, Wong Y, Glass K, Drace J, Rosen JM. Evaluation of a fiber optic glove for semi-automated goniometric measurements. J Rehabil Res Dev, 1990; 27: 411-24.