Benjamin J.Freglya,b,c,*, W.Gregory Sawyeraa aDepartment of Mechanical and Aerospace Engineering, University of Florida, Gainesville, FL 32611, USA
bDepartment of Biomedical Engineering, University of Florida, Gainesville, FL 32611, USA
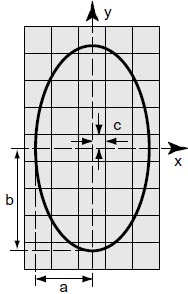
cDepartment of Orthopaedics and Rehabilitation, University of Florida, Gainesville, FL 32610, USA Abstract Contact pressure measurements in total knee replacements are often made using a discrete sensor such as the Tekscan K-Scan sensor.However, no method currently exists for predicting the magnitude of sensor discretization errors in contact force, peak pressure, average pressure, and contact area, making it difficult to evaluate the accuracy of such measurements.This study identifies a non-dimensional area variable, defined as the ratio of the number of perimeter elements to the total number of elements with pressure, which can be used to predict these errors.The variable was evaluated by simulating discrete pressure sensors subjected to Hertzian and uniform pressure distributions with two different calibration procedures.The simulations systematically varied the size of the sensor elements, the contact ellipse aspect ratio, and the ellipse’s location on the sensor grid.In addition, contact pressure measurements made with a K-Scan sensor on four different total knee designs were used to evaluate the magnitude of discretization errors under practical conditions.The simulations predicted a strong power law relationship (r2 > 0.89) between worst-case discretization errors and the proposed non-dimensional area variable.In the total knee experiments, predicted discretization errors were on the order of 1–4% for contact force and peak pressure and 3–9% for average pressure and contact area.These errors are comparable to those arising from inserting a sensor into the joint space or truncating pressures with pressure sensitive film.The reported power law regression coefficients provide a simple way to estimate the accuracy of experimental measurements made with discrete pressure sensors when the contact patch is approximately elliptical. 2003 Elsevier Science Ltd.All rights reserved. Keywords: Contact; Pressure; Measurement; Error; Estimation 1. Introduction Contact pressure measurements are frequently made in biomechanical studies of total knee replacements (TKRs) (Bristol et al., 1996; Harris et al., 1999; Liau et al., 1999; Stewart et al., 1995; Szivek et al., 1996; Wallace et al., 1998).One sensor used for such measurements is the Tekscan K-Scan sensor (Harris et al., 1999; Wallace et al., 1998).This sensor uses piezoresistive strips to measure pressure distribution over a grid of small elements.The pressure on each element is assumed to be constant and equal to the pressure measured at the center where the piezoresistive strips cross.Though studies in the contact mechanics literature have noted that the contact area predicted by elastic contact models is sensitive to the size of the perimeter elements (Kalker and Van Randen, 1972), no simple method exists for predicting the magnitude of errors in contact force F; peak pressure P0; average pressure P; and contact area A due to sensor discretization. This study proposes a non-dimensional area variable for predicting worst-case errors in F; P0; P; and A measured from TKRs using a discrete pressure sensor such as the Tekscan K-Scan sensor.This variable is defined as the ratio of the area of the perimeter elements to the total area with pressure.Its predictive capability is investigated by performing numerical simulations with hypothetical pressure sensors that systematically vary the element size, elliptical contact patch aspect ratio, and contact patch location on the sensor grid.Sen sor error estimates are important for comparing various pressure measurement technologies (Harris et al., 1999), different total knee designs (Stewart et al., 1995; Szivek et al., 1996), contact model predictions and experimental data (Jin et al., 1995b), and various sources of experimental error, such as inserting a sensor into the joint space (Wu et al., 1998) or truncating pressures with pressure sensitive film (Lewis, 1998a).Pr actical significance is evaluated by measuring contact areas in four total knee designs using a Tekscan K-Scan sensor and using the proposed non-dimensional variable to estimate the corresponding worst-case discretization errors. 2. Materials and methods Numerical simulations were developed to calculate the magnitude of the errors produced by the discretization process.The simulations investigated four cases combining two assumed pressure distributions and two calibration procedures.The pressure distributions were either Hertzian or uniform, since closed-form solutions for all simulated quantities exist, and since the pressure distribution in total knees is often approximately Hertzian (Jin et al., 1995a; Lewis, 1998b; McGloughlin and Monaghan, 1997; Stewart et al., 1995).Two distributions are necessary to determine if error estimates are sensitive to this variable.The calibration procedures were either force matched (known applied force) or pressure matched (known applied pressures). Force-matched calibrations typically use an in-line load cell to measure the total applied force, while pressurematched calibrations apply a constant hydrostatic pressure over the entire sensor. Hypothetical sensor arrays were used for the simulated contact pressure measurements.Each array was composed of square elements of half-dimension c that measured pressure at the center.The array was sized to cover an elliptical contact patch of semi-minor axis a and semi-major axis b: Normalized element size c/a and aspect ratio b/a were chosen in the range 0:01≤c/a≤0:3 and 1≤b/a≤20 to represent a wide variety of potential sensor configurations. Worst-case discretization errors were determined by an optimization procedure.For any sensor configuration, translating the grid along the semi-minor and semimajor directions changes the errors.Becau se grid translation produces non-continuous errors, a ‘‘brute force’’ rather than gradient-based optimization was employed.The optimization systematically translated the grid in the semi-minor x and semi-major y directions (Fig.1 ) between 0 and c in increments of 0:1c (i.e., 121 possible combinations).Since a search increment of 0:05c produced nearly identical results but with substantially longer run times, the selected increment was deemed adequate.  Fig.1. Simulated pressure sensor grid and elliptical contact region. Each grid element is square with half-dimension c; the semi-minor axis of the contact ellipse is a; and the semi-major axis is b: For any assumed size of a; the ratios b=a and c=a completely define the sensor configuration.Numerical simulations using a wide range of b=a and c=a values were performed to determine the maximum positive and negative percent errors in contact force, peak pressure, average pressure, and contact area for Hertzian and uniform pressure distributions and two different calibration procedures. Fig.1. Simulated pressure sensor grid and elliptical contact region. Each grid element is square with half-dimension c; the semi-minor axis of the contact ellipse is a; and the semi-major axis is b: For any assumed size of a; the ratios b=a and c=a completely define the sensor configuration.Numerical simulations using a wide range of b=a and c=a values were performed to determine the maximum positive and negative percent errors in contact force, peak pressure, average pressure, and contact area for Hertzian and uniform pressure distributions and two different calibration procedures.The non-dimensional
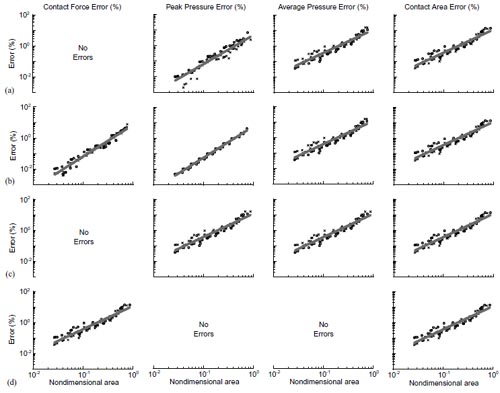
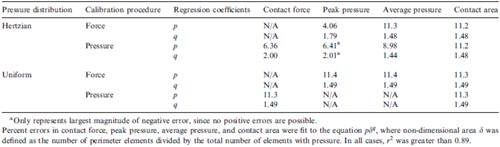
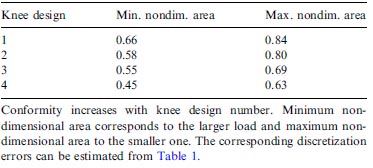
area δ (ratio of perimeter elements to total elements with pressure) was correlated to the maximum positive and negative errors in F; P0; P; and A found by the optimization.To calculate δ; a perimeter element was defined as one that had less than eight neighboring elements with non-zero pressure.The goal was to determine if δ could predict worst-case discretization errors for any assumed aspect ratio, thereby eliminating aspect ratio as an independent variable. To estimate the magnitude of discretization errors in TKR experiments, we measured contact area on four contemporary TKR designs from four different manufacturers. The designs ranged from non-conformal flaton- flat to moderately conformal curved-on-curved.All knees were tested on a MTS servohydraulic test machine in neutral alignment using a 0o flexion angle with 750 and 3000N loads (approximately one and four times bodyweight). 3. Results The non-dimensional area δ collapsed the experimental error curves (positive and negative) for different aspect ratios onto a single curve (Fig.2 ), with worst-case discretization errors following a clear power law Fig.2. Simulated discretization errors in contact force, peak pressure, average pressure, and contact area as a function of the proposed nondimensional area variable (see text) on a log–log scale.Each plot shows the combined results for contact patch aspect ratios of 1, 2, 5, 10, and 20, where each aspect ratio was tested over the range of non-dimensional area.(a) Hertzian pressure with force-matched calibration. (b) Hertzian pressure with pressure-match calibration.(c) Uniform pressure with force-match calibration. (d) Uniform pressure with pressure-matched calibration. x’s represent maximum positive errors and 0’s maximum negative errors.Non-dimen sional area increases as the size of the pressure elements approaches the size of the contact region. Table 1 – Power law regression coefficients for simulated worst-case sensor errors shown in Fig.1 Table 2 – Non-dimensional areas measured from four total knee designs in neutral alignment at 01 flexion using a Tekscan K-Scan sensor with loads of 750 and 3000N For the sample TKR experiments, the measured values of δ (Table 2) corresponded to predicted discretization errors of 1–4% for peak pressure and 3– 9% for average pressure and contact area, assuming a Hertzian pressure distribution with force-matched calibration. The minimum and maximum value of δ decreased as the conformity of the implant increased, with δ being smallest at the higher load.All contact patches were approximately elliptical with principal axes aligned with those of the sensor. 4. Discussion This study has presented a non-dimensional area variable to estimate the magnitude of discretization errors in TKR contact force, peak pressure, average pressure, and contact area measured with a discrete sensor such as the Tekscan K-Scan sensor.Estima tion of these errors is important for evaluating the accuracy of experimental contact pressure and area measurements made with such sensors. The primary assumptions of the numerical simulations were that the contact patch is elliptical and the principal axes are aligned with those of the sensor.W hile these assumptions are consistent with typical TKR experiments (Stewart et al., 1995; Szivek et al., 1996), they limit the applicability of the results.To investigate wider applicability, we performed additional numerical simulations that relaxed these restrictions.One set rotated the contact ellipse by 51 increments between 01 and 451 using a Hertzian pressure distribution with force-matched calibration, which approximates TKR K-Scan experiments.Curve fitting of the error predictions produced q values nearly identical to the unrotated case and p values 35–50% lower (Table 1), along with lower r2 values (0.57–0.77 rather than>0.89). Thus, the aligned case provided the best estimate of worst-case errors.A second set of simulations investigated contact patches of various shapes, including a rectangle, two rectangles that crossed off-center, and two circles of different radii that touched at one point.Each of these shapes possessed a known area, making it possible to perform uniform pressure simulations.W hile the two touching circles produced p and q values nearly identical to the elliptical case, the shapes with sharp corners yielded p values close to 30 and q values closer to 1. Thus, the proposed regression coefficients appear to be applicable only to contact patches without sharp corners. One is the effect of inserting the sensor into the joint space.Using a finite element model, Wu et al. (1998) predicted that a sensor substantially stiffer than the contacting cartilage (100MPa for Fuji film versus 0.6MPa for articular cartilage) could change the measured peak pressures by 10–26%.Since the contact surfaces in artificial knees are substantially stiffer (approximately 500MPa for polyethylene; Stewart et al., 1995) than commonly used sensor materials, peak pressure changes in artificial joints are likely less than 10%.Ano ther source of error is pressure truncation, which occurs when the sensor can measure only a limited range of pressures (e.g., pressure sensitive film) (Lewis, 1998a).To investigate this error, we simulated pressure sensitive film by using very small elements and truncating all pressures below 30% of maximum (value based on Pressurex/Fuji Prescale product literature). For a Hertzian pressure distribution, the simulation predicted little error in peak pressure and between 5% and 10% errors in contact force, average pressure, and contact area.In typical TKR experiments, discretization errors can therefore be on the same order of magnitude as errors caused by inserting the sensor into the joint space or truncating pressures with pressure sensitive film. In summary, a non-dimensional area variable is proposed that can predict worst-case sensor discretization errors in average pressure and contact area when the contact patch is approximately elliptical.If the pressure distribution is close to Hertzian or uniform, errors in contact force and peak pressure can be estimated as well.Usi ng the reported power law regression coefficients, researchers can estimate worstcase errors regardless of the contact patch aspect ratio and orientation.These estimates are not available by other means and can be valuable for evaluating the accuracy of experimental data. References - Bristol, R.E., Fitzpatrick, D.C., Brown, T.D., Callaghan, J.J., 1996. Non-uniformity of contact stress on polyethylene inserts of total knee replacements.Clinical Biomechanics 11, 75–80.
- Harris, M.L., Morberg, P., Bruce, W.J.M., Walsh, W.R., 1999. An improved method for measuring tibiofemoral contact areas in total knee arthroplasty: a comparison of K-Scan sensor and Fuji film. Journal of Biomechanics 32, 951–958.
- Jin, Z.M., Dowson, D., Fisher, J., 1995a. Contact pressure prediction in total knee joint replacements.Part 1: general elasticity solution for elliptical layered contacts.Proceedings of the Institution of Mechanical Engineers Part H 209, 1–8.
- Jin, Z.M., Dowson, D., Fisher, J., 1995b. Contact pressure prediction in total knee joint replacements.Part 2: application to the design of total
knee joint replacements.Proceedings of the Institution of Mechanical Engineers Part H 209, 9–15. - Kalker, J.J., Van Randen, Y., 1972. A minimum principle for frictionless elastic contact with application to non-Hertzian halfspace contact problems.Journal of Engineering Mathematics 6, 193–206.
- Lewis, G., 1998a. Contact stress at articular surfaces in total joint replacements.Part I: experimental methods.Bio-Medi cal Materials and Engineering 8, 91–110.
- Lewis, G., 1998b. Contact stress at articular surfaces in total joint replacements.Part II: analytical and numerical methods. Bio- Medical Materials and Engineering 8, 259–278.
- Liau, J.-J., Cheng, C.-K., Huang, C.-H., Lee, Y.-M., Chueh, S.-C., Lo, W.-H., 1999. The influence of contact alignment of the tibofemoral joint of the prosthesis in in vitro biomechanical testing.Clinical Biomechanics 14, 717–721.
- McGloughlin, T.M., Monaghan, J.M., 1997. Contact stress analysis of the tibial component of prosthetic knee implants.Proceedin gs of the Institution of Mechanical Engineers Part H 209, 225–231.
- Stewart, T., Jin, Z.M., Shaw, D., Auger, D.D., Stone, M., Fisher, J., 1995.Experiment al and theoretical study of the contact mechanics of five total knee joint replacements.Proceedings of the Institution of Mechanical Engineers Part H 209, 225–231.
- Szivek, J.A., Anderson, P.L., Benjamin, J.B., 1996. Average and peak contact stress distribution evaluation of total knee arthroplasties. Journal of Arthroplasty 11, 952–963.
- Wallace, A.L., Harris, M.L., Walsh, W.R., Bruce, W.J.M., 1998. Intraoperative assessment of tibiofemoral contact stresses in total knee arthroplasty.Journal of Arthroplasty 13, 923–927.
- Wu, J.Z., Herzog, W., Epstein, M., 1998. Effects of inserting a pressensor film into articular joints on the actual contact mechanics.Journal of Biomechanical Engineering 120, 655–659.
|